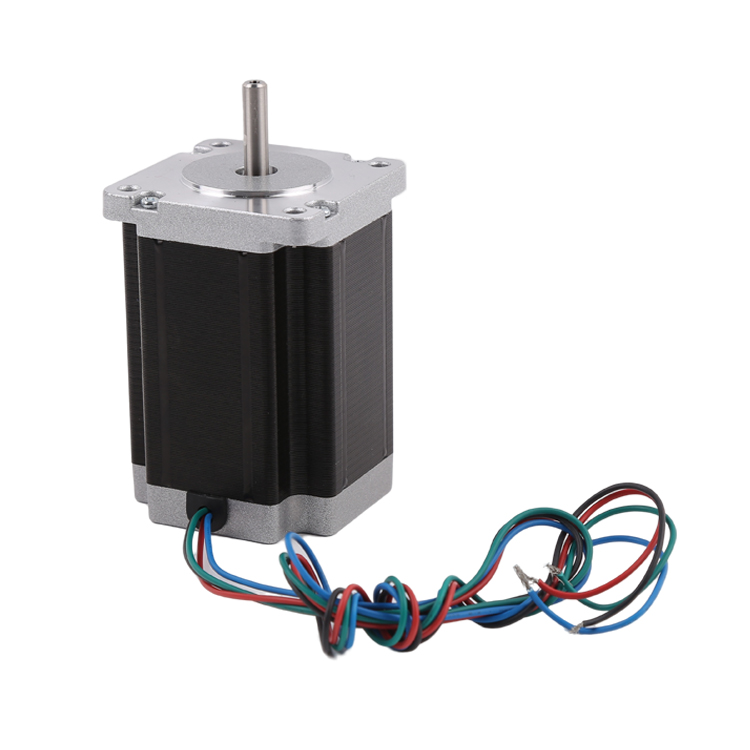

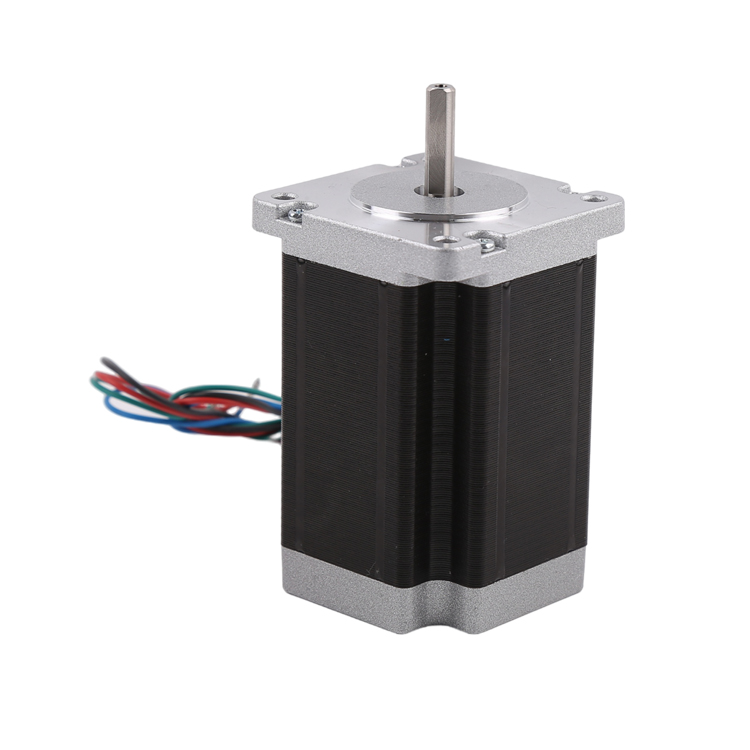


고토크 NEMA 23 하이브리드 스테퍼 모터, 모터 직경 57mm
설명
이 제품은 NEMA 23 규격의 직경 57mm 하이브리드 스테퍼 모터입니다.
고객은 계단 각도를 1.8도와 0.9도 중에서 선택할 수 있습니다.
모터 높이는 41mm, 51mm, 56mm, 76mm, 100mm, 112mm입니다.
모터의 무게와 토크는 높이에 비례합니다.
모터의 표준 출력축은 D형 축이며, 사다리꼴 리드 스크류 축으로 교체할 수도 있습니다.
고객님께서는 필요에 따라 아래 매개변수를 선택하시면 됩니다. 모터에 관한 문의사항이 있으시면 언제든지 연락 주십시오. 더욱 전문적인 지원을 제공해 드리겠습니다.
매개변수
| 계단 각도 (°) | 모터 길이 (mm) | 유지 토크 (g*cm) | 현재의 /단계 (A/위상) |
저항 (Ω/단계) | 인덕턴스 (mH/상) | 수 리드 | 회전 관성 (g*cm2) | 무게 (KG) |
| 0.9 | 41 | 3.9 | 1 | 5.7 | 0.7 | 6 | 120 | 0.45 |
| 1.8 | 41 | 3.9 | 2 | 1.4 | 1.4 | 8 | 150 | 0.47 |
| 0.9 | 51 | 7.2 | 2 | 1.6 | 2.2 | 6 | 280 | 0.59 |
| 1.8 | 51 | 3009 | 2 | 1.8 | 2.7 | 8 | 230 | 0.59 |
| 0.9 | 56 | 12 | 2.8 | 0.9 | 3.3 | 4 | 300 | 0.7 |
| 1.8 | 56 | 9 | 2 | 1.8 | 2.5 | 6 | 280 | 0.68 |
| 0.9 | 76 | 18 | 2.8 | 1.15 | 5.6 | 4 | 480 | 1 |
| 1.8 | 76 | 13.5 | 3 | 1 | 1.6 | 6 | 440 | 1.1 |
| 1.8 | 100 | 30 | 4.2 | 0.75 | 3 | 4 | 700 | 1.3 |
| 1.8 | 112 | 31 | 4.2 | 0.9 | 3.8 | 4 | 800 | 1.4 |
위의 사양은 참고용 표준 제품이며, 모터는 고객 요구 사항에 따라 맞춤 제작할 수 있습니다.
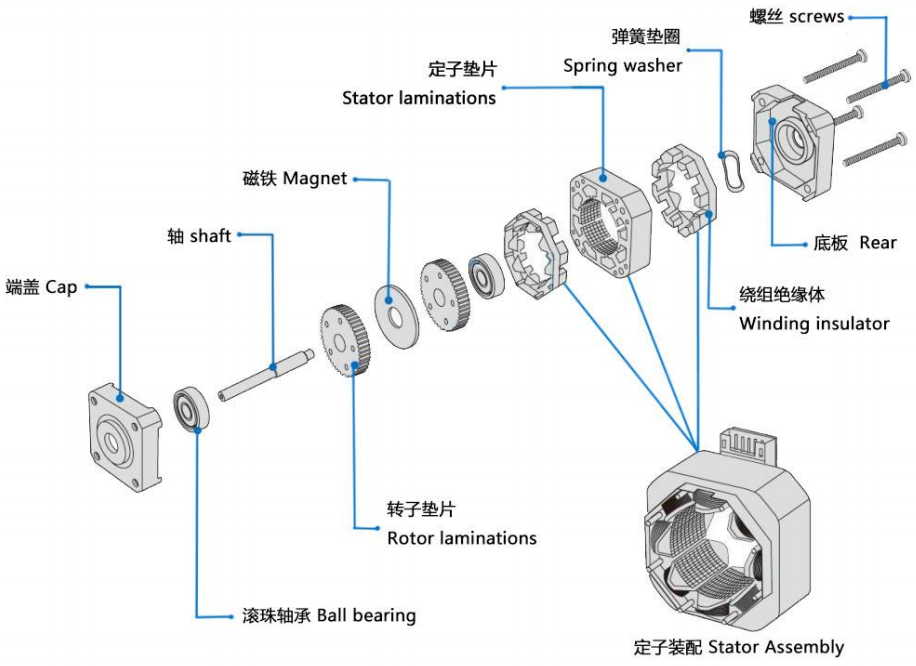
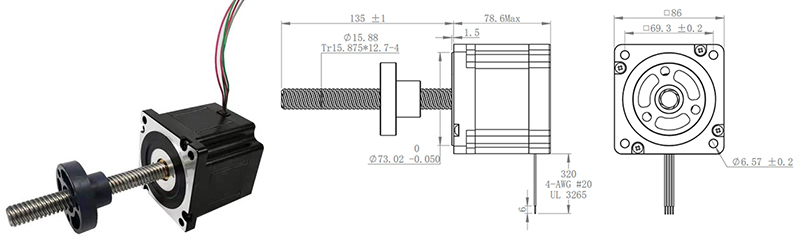
설계 도면
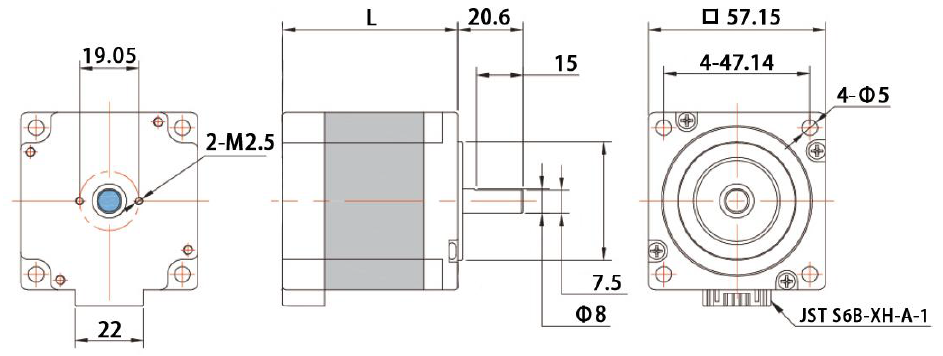
NEMA 스테퍼 모터의 기본 구조
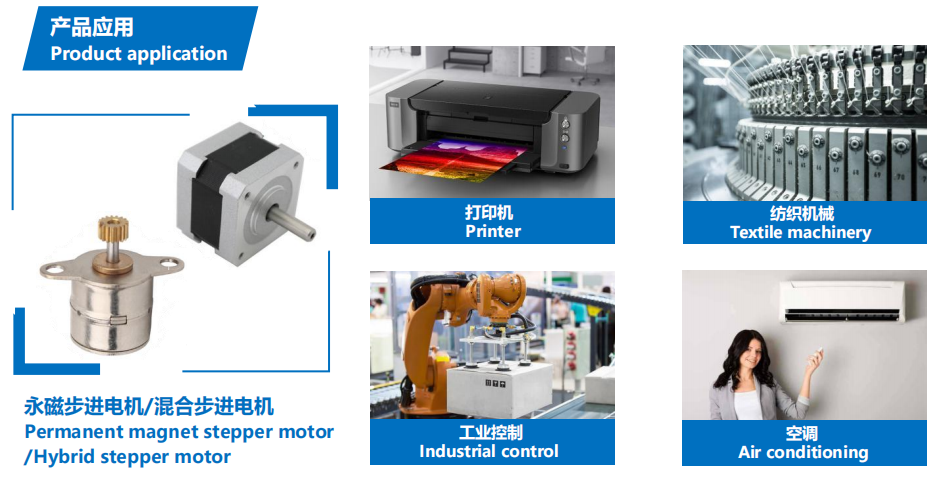
하이브리드 스테퍼 모터의 응용
하이브리드 스테퍼 모터는 높은 해상도(회전당 200 또는 400 스텝) 덕분에 다음과 같이 높은 정밀도가 요구되는 응용 분야에 널리 사용됩니다.
3D 프린팅
산업 제어(CNC, 자동 밀링 머신, 섬유 기계)
컴퓨터 주변기기
포장 기계
그리고 높은 정밀도의 제어가 필요한 기타 자동 시스템들.
하이브리드 스테퍼 모터에 대한 응용 노트
고객은 "먼저 스테퍼 모터를 선택하고, 기존 스테퍼 모터에 맞는 드라이버를 선택하는" 원칙을 따라야 합니다.
하이브리드 스텝 모터를 구동할 때는 풀스텝 주행 모드를 사용하지 않는 것이 가장 좋으며, 풀스텝 주행 시 진동이 더 커집니다.
하이브리드 스테퍼 모터는 저속 환경에 더 적합합니다. 속도는 1000rpm(0.9도에서 6666PPS)을 넘지 않는 것이 좋으며, 1000~3000PPS(0.9도) 범위에서 사용하는 것이 바람직합니다. 기어박스를 연결하여 속도를 낮출 수 있습니다. 이 모터는 적절한 주파수에서 높은 작동 효율과 낮은 소음을 제공합니다.
역사적인 이유로 인해 정격 전압이 12V인 모터만 12V 전원을 사용합니다. 설계 도면에 표시된 다른 정격 전압은 모터에 가장 적합한 구동 전압이 아닐 수 있습니다. 고객께서는 필요에 따라 적절한 구동 전압과 드라이버를 선택하셔야 합니다.
모터를 고속 또는 대용량으로 사용할 경우, 일반적으로 작동 속도로 바로 시동하지 마십시오. 주파수와 속도를 점진적으로 높이는 것이 좋습니다. 이는 두 가지 이유 때문입니다. 첫째, 모터의 스텝 손실을 방지할 수 있고, 둘째, 소음을 줄이고 위치 정밀도를 향상시킬 수 있습니다.
모터는 진동 영역(600 PPS 미만)에서 작동해서는 안 됩니다. 저속으로 사용해야 하는 경우, 전압이나 전류를 변경하거나 감쇠 장치를 추가하여 진동 문제를 줄일 수 있습니다.
모터가 600PPS(0.9도) 미만으로 작동할 때는 작은 전류, 큰 인덕턴스 및 낮은 전압으로 구동해야 합니다.
관성 모멘트가 큰 부하에는 대형 모터를 선택해야 합니다.
더 높은 정밀도가 요구되는 경우, 기어박스를 추가하거나 모터 속도를 높이거나 분할 구동 방식을 사용하는 등의 방법으로 해결할 수 있습니다. 또한 5상 모터(단극 모터)를 사용할 수도 있지만, 전체 시스템 가격이 상대적으로 비싸기 때문에 거의 사용되지 않습니다.
스테퍼 모터 크기:
현재 20mm(NEMA8), 28mm(NEMA11), 35mm(NEMA14), 42mm(NEMA17), 57mm(NEMA23), 86mm(NEMA34) 하이브리드 스테퍼 모터를 보유하고 있습니다. 하이브리드 스테퍼 모터를 선택하실 때는 먼저 모터 크기를 결정하신 후 다른 매개변수를 확인하시는 것을 권장합니다.
맞춤형 서비스
모터 설계는 다음과 같은 고객 요구 사항에 따라 조정할 수 있습니다.
모터 직경: 6mm, 8mm, 10mm, 15mm, 20mm 직경의 모터가 있습니다.
코일 저항/정격 전압: 코일 저항은 조절 가능하며, 저항이 높을수록 모터의 정격 전압이 높아집니다.
브래킷 디자인/리드 스크류 길이: 고객이 브래킷을 더 길거나 짧게 만들고 싶어하는 경우, 장착 구멍과 같은 특수 디자인을 통해 조절 가능합니다.
PCB + 케이블 + 커넥터: PCB 설계, 케이블 길이 및 커넥터 간격은 모두 조정 가능하며, 고객 요청 시 FPC로 교체할 수 있습니다.
리드 타임
샘플 재고가 있는 경우 3일 이내에 샘플을 발송할 수 있습니다.
재고 샘플이 없는 경우 제작해야 하며, 제작 기간은 약 20일입니다.
대량 생산의 경우, 생산 소요 기간은 주문 수량에 따라 달라집니다.
결제 방법 및 결제 조건
샘플 주문 시에는 일반적으로 페이팔 또는 알리바바 결제를 이용하실 수 있습니다.
대량 생산의 경우 T/T 결제를 받습니다.
샘플 제작의 경우, 생산 전에 전액 결제를 받습니다.
대량 생산의 경우, 생산 전에 50%의 선금을 받고, 나머지 50%는 배송 전에 수령하는 방식으로 진행할 수 있습니다.
저희가 6회 이상 주문을 함께 진행한 후에는 A/S(시력 후 지급)와 같은 다른 결제 조건을 협의할 수 있습니다.
자주 묻는 질문
1. 샘플의 일반적인 배송 기간은 얼마나 걸립니까? 대량 주문의 경우 배송 기간은 얼마나 걸립니까?
샘플 주문의 리드타임은 약 15일이며, 대량 주문의 리드타임은 25~30일입니다.
2. 맞춤 제작 서비스도 제공하시나요?
모터 파라미터, 리드선 종류, 출력축 등 제품 맞춤 제작이 가능합니다.
3. 이 모터에 엔코더를 추가할 수 있습니까?
이러한 유형의 모터에는 모터 마모 캡에 엔코더를 추가할 수 있습니다.
자주 묻는 질문
1. 장기간 사용 후 스테퍼 모터 부하 증가의 원인 및 해결책
원인: 어떤 경우에는 스테퍼 모터가 장시간 정상적으로 작동하다가 일정 시간이 지나면 스텝 손실이 발생할 수 있습니다. 이 경우 스테퍼 모터에 걸리는 부하가 변했을 가능성이 높습니다. 이는 스테퍼 모터 베어링의 마모 또는 외부 영향으로 인해 발생할 수 있습니다.
해결책.
①외부 환경에 변화가 없는지 확인하십시오. 모터 구동 메커니즘에 변경 사항이 있습니까?
②베어링 마모를 확인하십시오. 모터 수명을 연장하려면 부싱 대신 볼 베어링을 사용하십시오.
③ 주변 온도가 변하지 않았는지 확인하십시오. 마이크로 모터의 경우 베어링 그리스 점도의 영향이 무시할 수 없습니다. 작동 범위에 적합한 그리스를 사용하십시오. (예: 그리스는 극한 온도 또는 장시간 사용 시 점도가 높아져 모터 부하가 증가할 수 있습니다.)
2. 스테퍼 모터 발열 원인
①구동기가 설정한 전류가 모터의 정격 전류보다 큽니다.
② 모터 속도가 너무 빠릅니다
③ 모터 자체는 관성과 위치 토크가 크기 때문에 중속 운전 시에도 발열이 발생하지만 모터 수명에는 영향을 미치지 않습니다. 모터의 탈자점은 130~200℃이므로 70~90℃는 정상적인 현상이며, 130℃ 미만이면 일반적으로 문제가 없습니다. 만약 과열이 느껴진다면 구동 전류를 정격 모터 전류의 약 70%로 설정하거나 모터 속도를 약간 낮추십시오.
3. 스테퍼 모터에 전원을 공급했을 때 모터 축이 회전하지 않습니다. 어떻게 해야 합니까?
모터가 회전하지 않는 데에는 여러 가지 이유가 있습니다.
A. 과부하로 인한 회전 차단
B. 모터가 손상되었는지 여부
C. 모터가 오프라인 상태인지 여부
D. 펄스 신호 CP가 0인지 여부





